Quadruped Dog Robot: CLAW
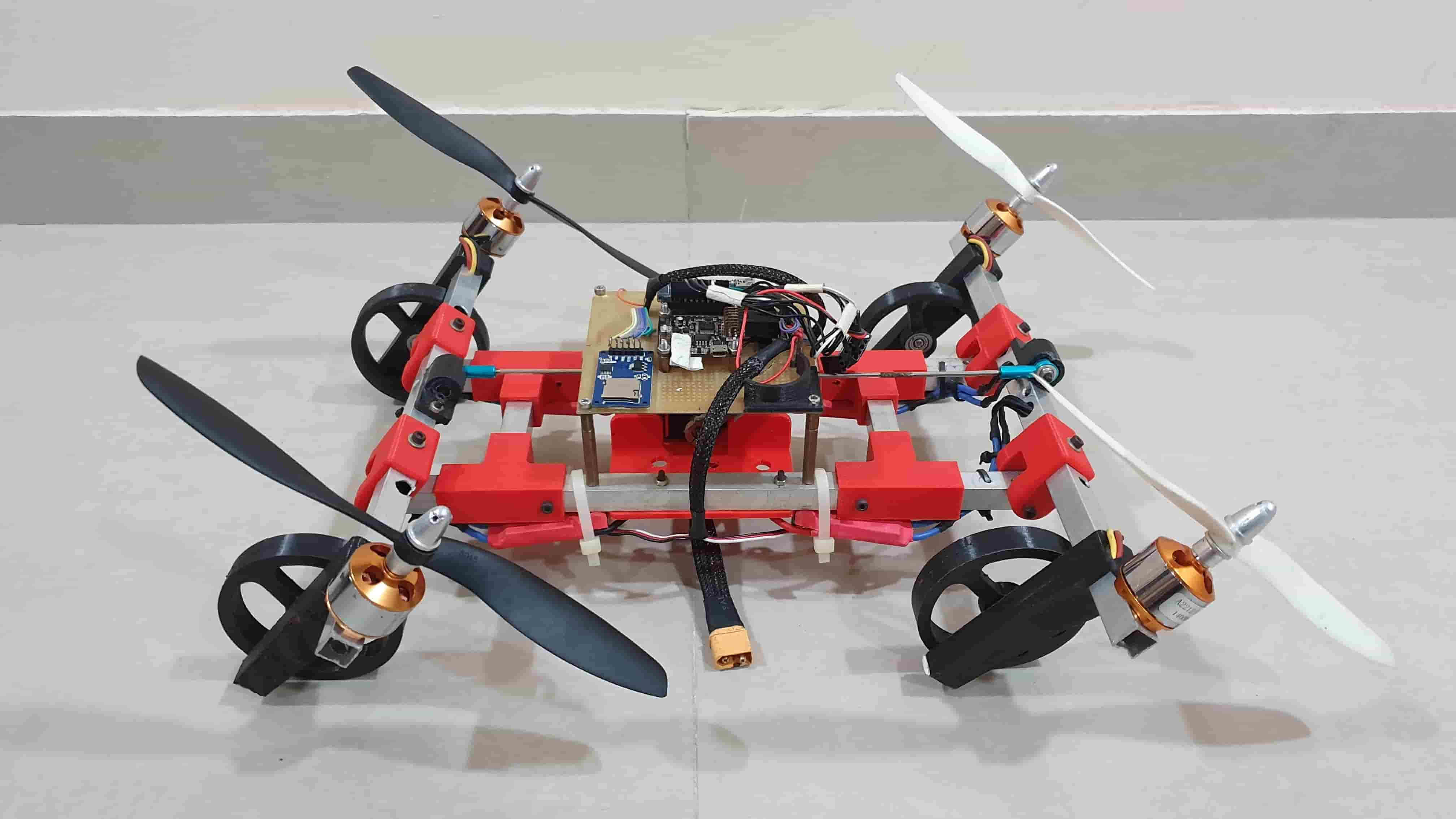
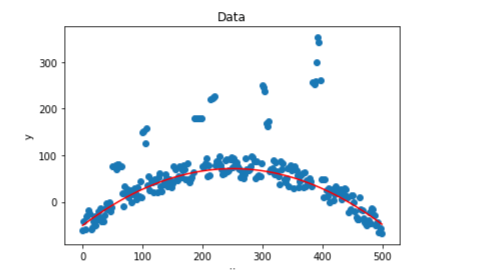
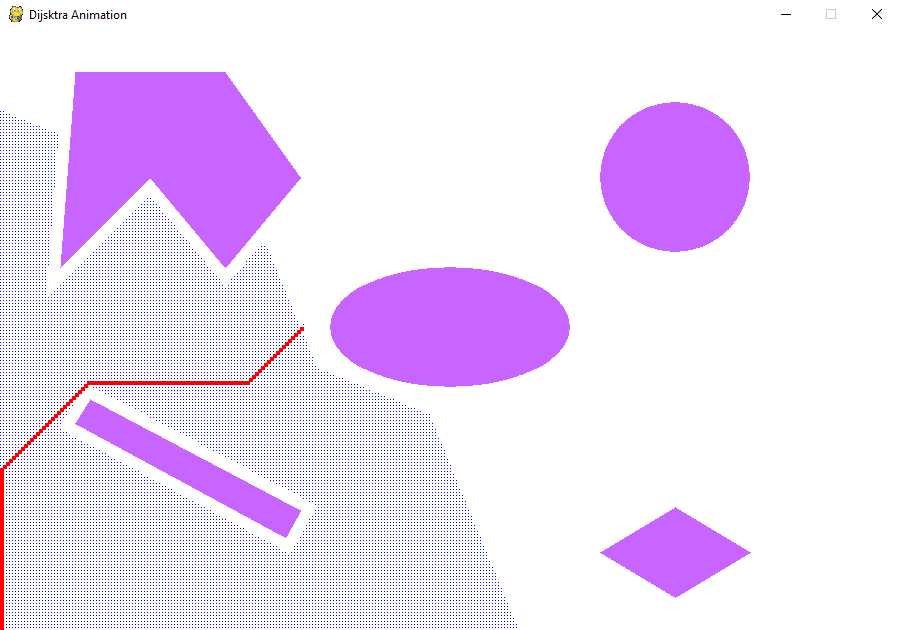
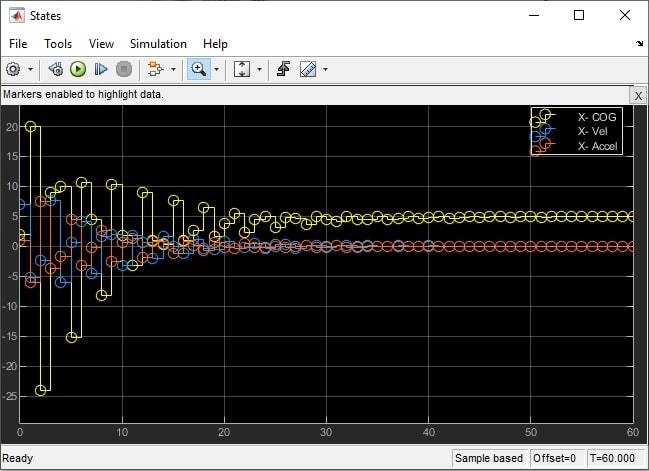
Built a 12-DOF Quadruped Dog Robot Capable of walking on complex terrain and performing agile movements. Modeled the Forward & Inverse Kinematics, Jacobian & Velocity Kinematics. Designed Jerk Optimized Trajectories using Quintic Polynomial, Parameterized Bezier's, Compound Cycloid for Pose manipulation and Gait engine. Implemented a Cartisian PD controller to introduce virtual compliance in joints to take ground impacts and emulate an animals leg. Designed and Developed the entire Hardware: Mechanical, Electrical as well as CAD Models. Simulated the robot in V-REP to perform test & Analysis of Kinematics & Dynamics. Based on ROS and uses Stereo vision for creating a terrain costmap to plan footstep. Implemented and simulated an LQR controller for stable trot gait over uneven surfaces, in MATLAB.
Quadruped Robot
ROS
Kinematics
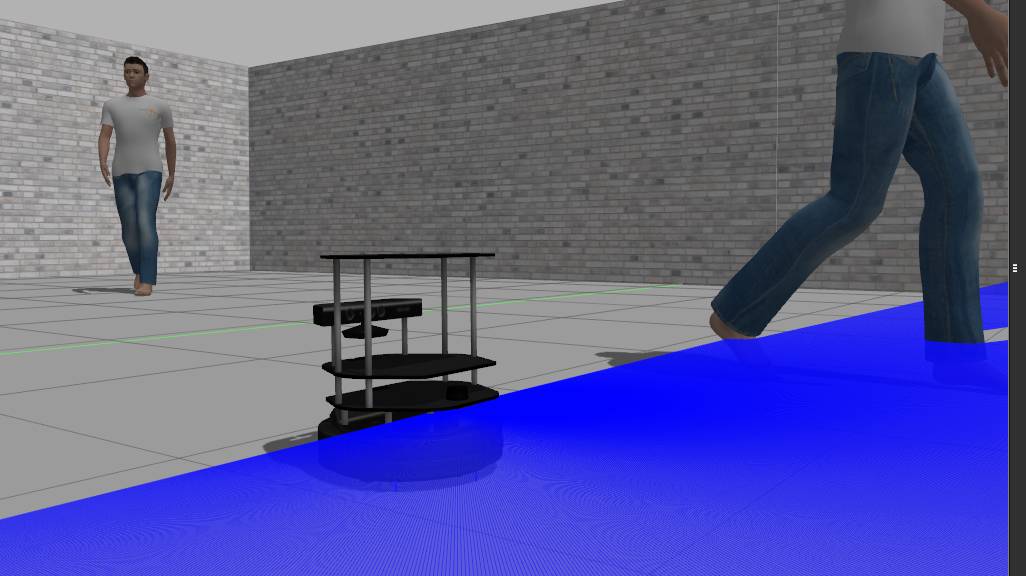
Simulation
LQR Controller
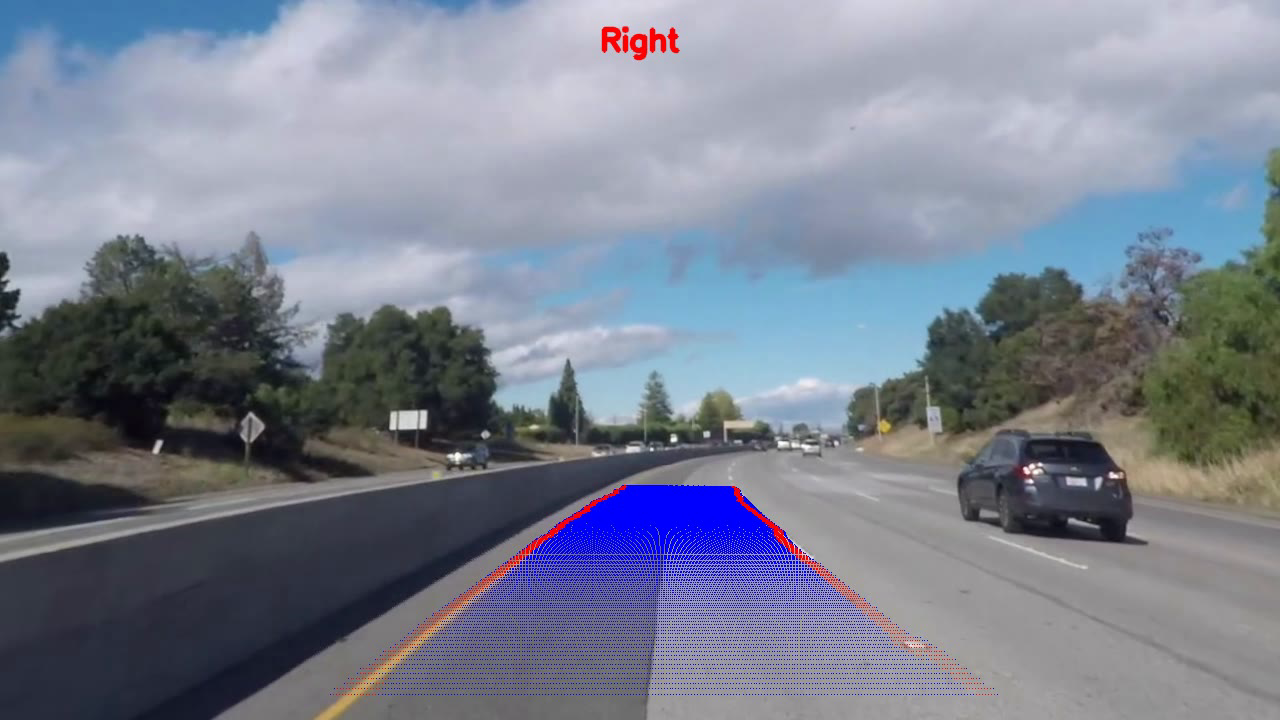
Stereo Vision
Brushless Motors
Gearing
Torque Control
3D Printing